In the previous section we presented OPA as a means to achieve rigid body registration in the context of optical tracking, it has in fact a much wider applicability in all IGI applications (Yaniv (2008)). For example, while the OPA address the registration in a pair-wise fasion, it is a precursor for surface-based registration (Besl & McKay (1992)), both are either as an end in itself or as a precursor to nonrigid registration. Here, we will examine how to achieve the best rigid body registration in the context of minimizing errors.
Fiducial Points¶
Let’s solidify the concept of rigid registration with terminology. Using the context provided in optical tracking using rigid body registration, there are two types of data points:
Model point sets (): geometry of points sets (i.e. the location of the optical retroreflective spheres) that are assumed to be error-free:
They were designed and manufactured with very high precision,
It is assumed that the manufactured device, i.e. the physical locations of these retroreflective spheres relative to each other, matches that with the CAD model exactly, hence the name model point sets,
In practice, there will be deviation between the (manufactured) physical location with the CAD model!
Other examples may includes:
In the literature, they may be referred to as reference points or reference fiducial points.
Measurement point sets (): geometry of these fiducial points measured (localized) in another modality such as
A tracking system,
Another image modality.
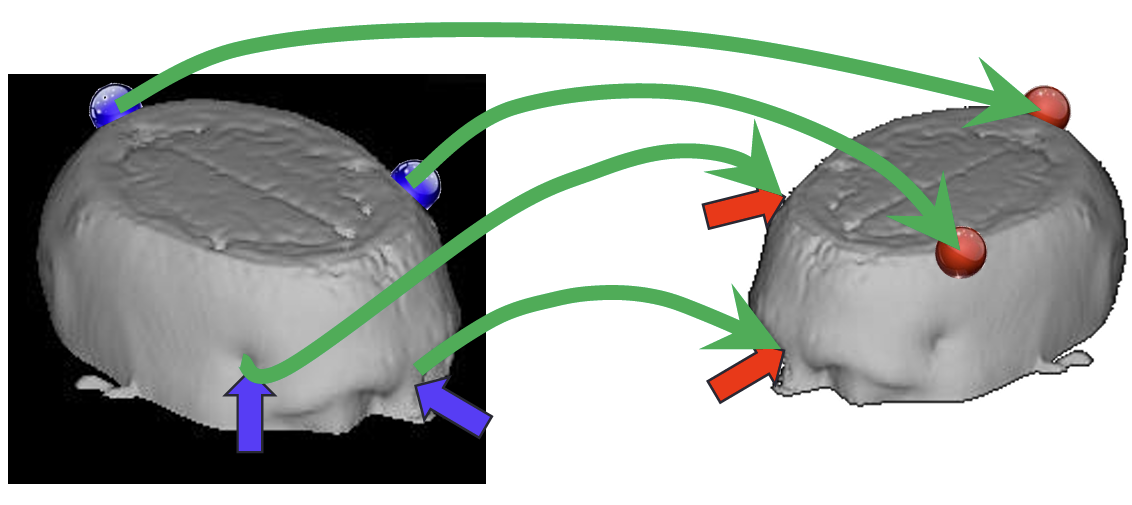
Figure 1:A visualization of fiducial, rigid, registration. The blue fiducial points are localized from a medical imaging modality and are typically assumed to be free of error. The blue fiducial points serve as the model (reference) points. The red are those measured in another modality, such as those by a tracking system during the surgery, termed as the measurement point sets. Image courtesy of Prof. J. Michael Fitzpatrick at Vanderbilt University, accessed here, February 1, 2026.
Registration Fiducial Points and Target Fiducial Points¶
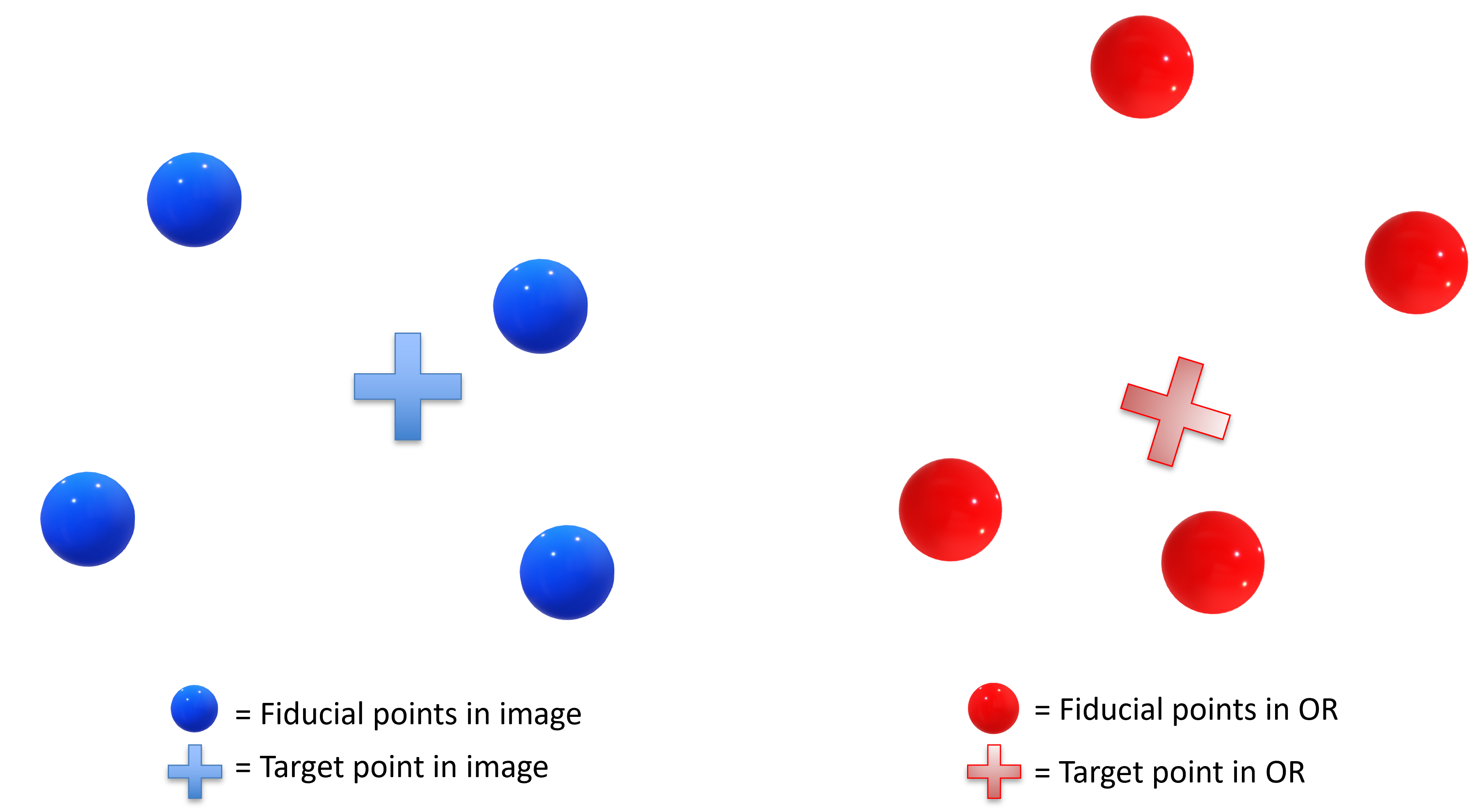
The purpose of rigid registration is to find a transformation (Rotation followed by Translation), that maps the model fiducial point set to those measurement point sets in a different modality. In the process of doing so, we also want to find out the location of a target:
In this regard, we further differentiate between two types of fiducial points:
Registration Fiducial are fiducial points whose locations are used to derive the rigid registration transformation. Examples include
Anatomical structures that are easily accessible (e.g. tip of a nose),
Artificial markers attached to the patients,
Retroreflective spheres of an optically tracked surgical stylus, and
Target Fiducial are fiducial points whose location(s) is not used to derive the registration registration, but are of some other interests. Examples include
Anatomical structures that are not easily accessible such as the location of a tumour,
The tip of an optically tracked surgical stylus.
Fiducial Localization Error¶
In current literatures of IGI, the model fiducial point set is assumed to be error-free, i.e. their measurement exact, although in practice they are not. On the other hand, when the registration fiducials are physically measured in another modality, such a via optical tracking, errors and noise in measurement will inevitably be introduced, resulting in Fiducial Localization Error (FLE).
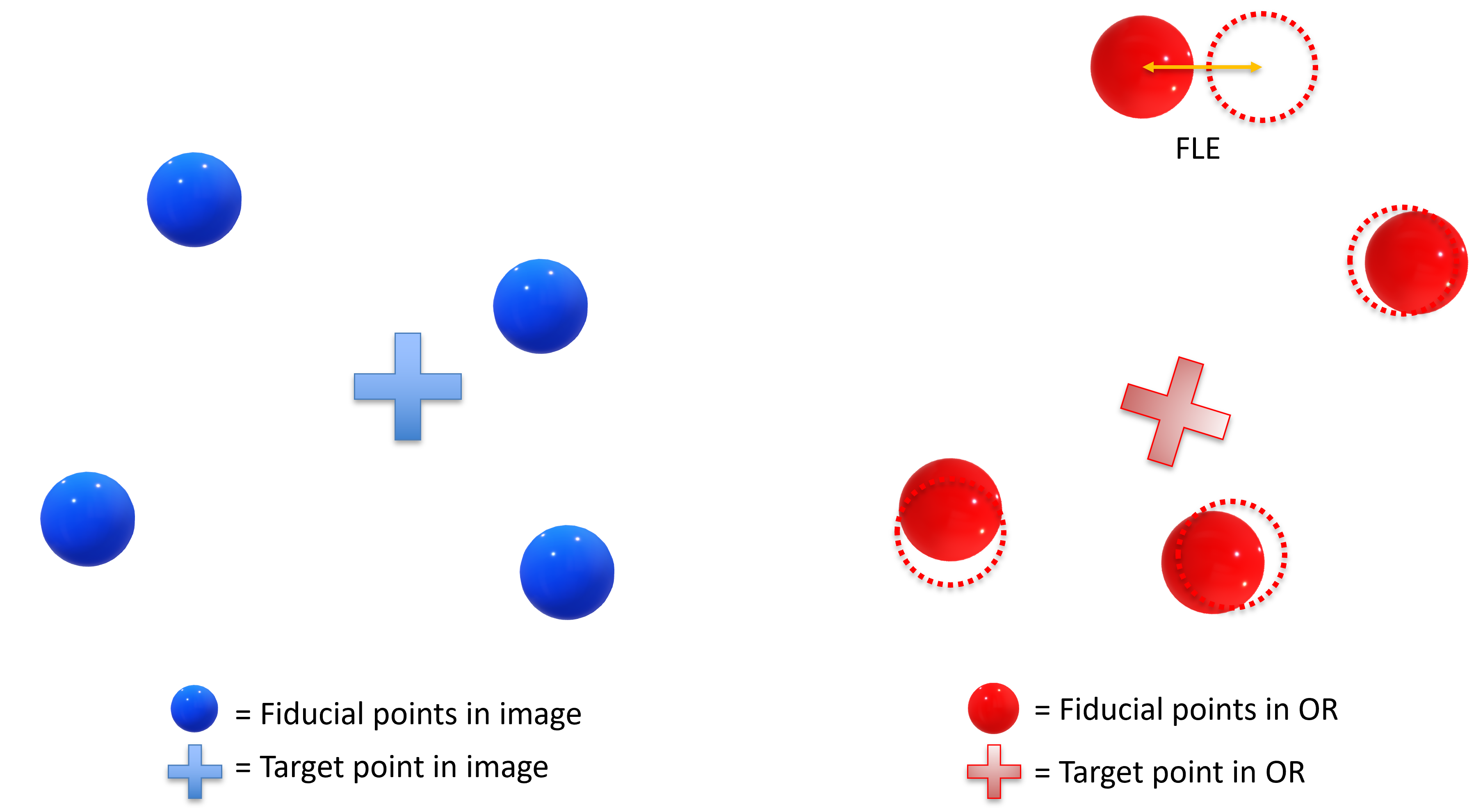
Figure 3:In this exggeratd example, the location of the measured fiducial points set contain errors: The solid spheres are in their true location, where as the dashed spheres are the measured (localized) locations. The Euclidean distance between the true and the measured location is termed Fiducial Localization Error (FLE).
That is, the FLE is the euclidean distance between the forever unknown ground truth value and the known, but with error, measurements.
Note that the ground-truth value can never be determined exactly as there will always be error and noise in the measurement. However, according to Law of large numbers, if a sufficient large number of independent measurements are made, their *average converges to the true value, if it exist. Formally, the law of large numbers states that **given a sample of independent and identically distributed values, the sample mean converges to the
Fiducial Registration Error and Target Registration Error¶
Given two homologous point sets, the (perfect) model points and the (contaminated) measured points , the objective of the rigid-body transform is to find a rotation and translation that minimizes the Euclidean distance between the model point set and the measurement point set after the registration:
where is the cardinality of the point sets (and homologous implies that there is a one-to-one correspondence, implying that both point sets have the same cardinality), and are the rotation and translation to be determined, respectively, and FRE (or Fiducial Registration Error) is the averaged Euclidean distance between each paired-points after the registration.
The closed-form OPA solution introduced earlier is, in fact, the optimal solution in the L2-norm sense, provided the errors in the measured points are zero-mean, isotropic, independent, and identically distributed.
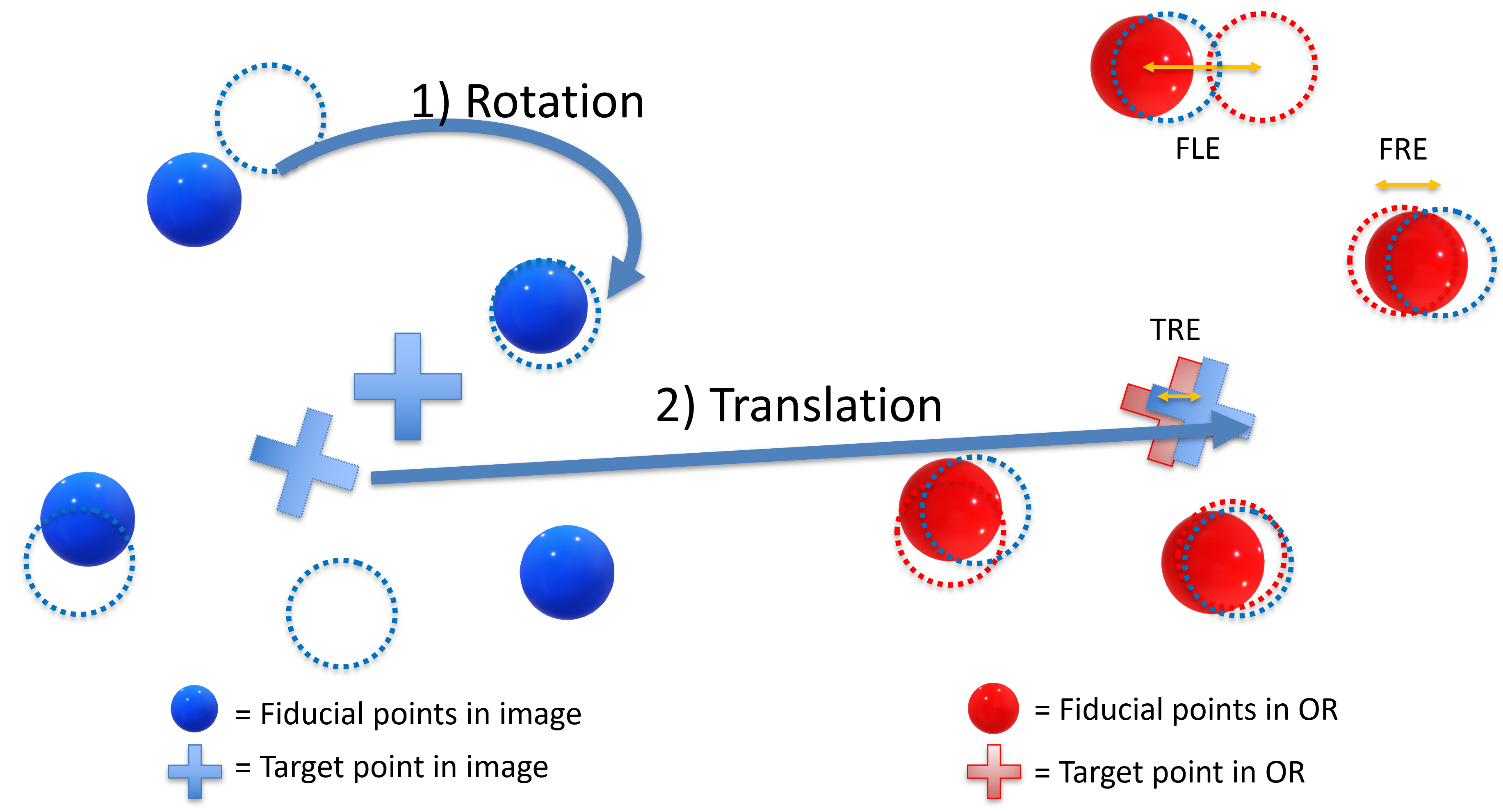
Figure 4:Rigid Registration transforms one point set, using rotation and translation, to another point set. The Euclidean distance between the registration fiducial points is termed Fiducial Registration Error (FRE), where as the Euclidean distance between the target fiducial points is termed Target Registration Error (TRE). Ths misalignments after registration are the results of Fiducial Localization Error (FLE).
Concretely, let be the registration fiducial and be the target point. Then,
is the Euclidean distance between and after registration, and
where is the transformed point , and TRE(q) is the Euclidean disance of and after the transformation, and
Again, it should be noted that the closed-form solution is optimal assuming that the original errors are isotropic, independent and identically distributed (IID) with a zero mean Gaussian distribution. In most cases, however, these assumptions do not hold.
For example, measurements from optical tracking system are anisotropic with the uncertainly larger in the axis parallel to the viewing angle of the camera, but nonetheless the closed-form solution serves as a reasonable approximation to the true solution.
Fiducial Registration Error is readily available!¶
Once the rigid transformation between the model and the measured fiducial points are determined, the FRE can be trivially calculated as the mean of the euclidean distance between the transformed model point fiducial points and the measured fiducial points.
However, because, in general, the localation of a target cannot be measured directly (e.g. in the OR), TRE cannot be determined directly.
That is, while TRE is generally unavailable, the FRE is readily available as long as a rigid body transform can be determined.
It is for this reason, nearly all surgical navigation system used clinical always report FRE as a measure of the registration accuracy.
The question is, is FRE a good measure of registration accuracy?
FRE and TRE are Uncorrelated!¶
By now, you should have developed an intuition that registration errors, such as TRE and FRE, are the direct consequency of FLE. In fact, TRE is influenced by several factors as demonstrated by the following equation (Fitzpatrick (2009)):
where is the number of registration fiducial points, the operator denotes the expected values, is the distance of the target fiducial from principal axes of the registration fiducial configuration, and is the RMS distance of the registration fiducial points from the principal axis .
That is, the expected squared value of TRE is:
Proportional to the expected squared value of FLE,
Proportional to the distance between a target () location to the principal axes of the registration fiducial configuration,
Inversely proportional to the number of registration fiducial points used to achieve the registration, and
Inversely proportional to the RMS distance of the registration fiducial points from their principal axes of the registration fiducial configuration.
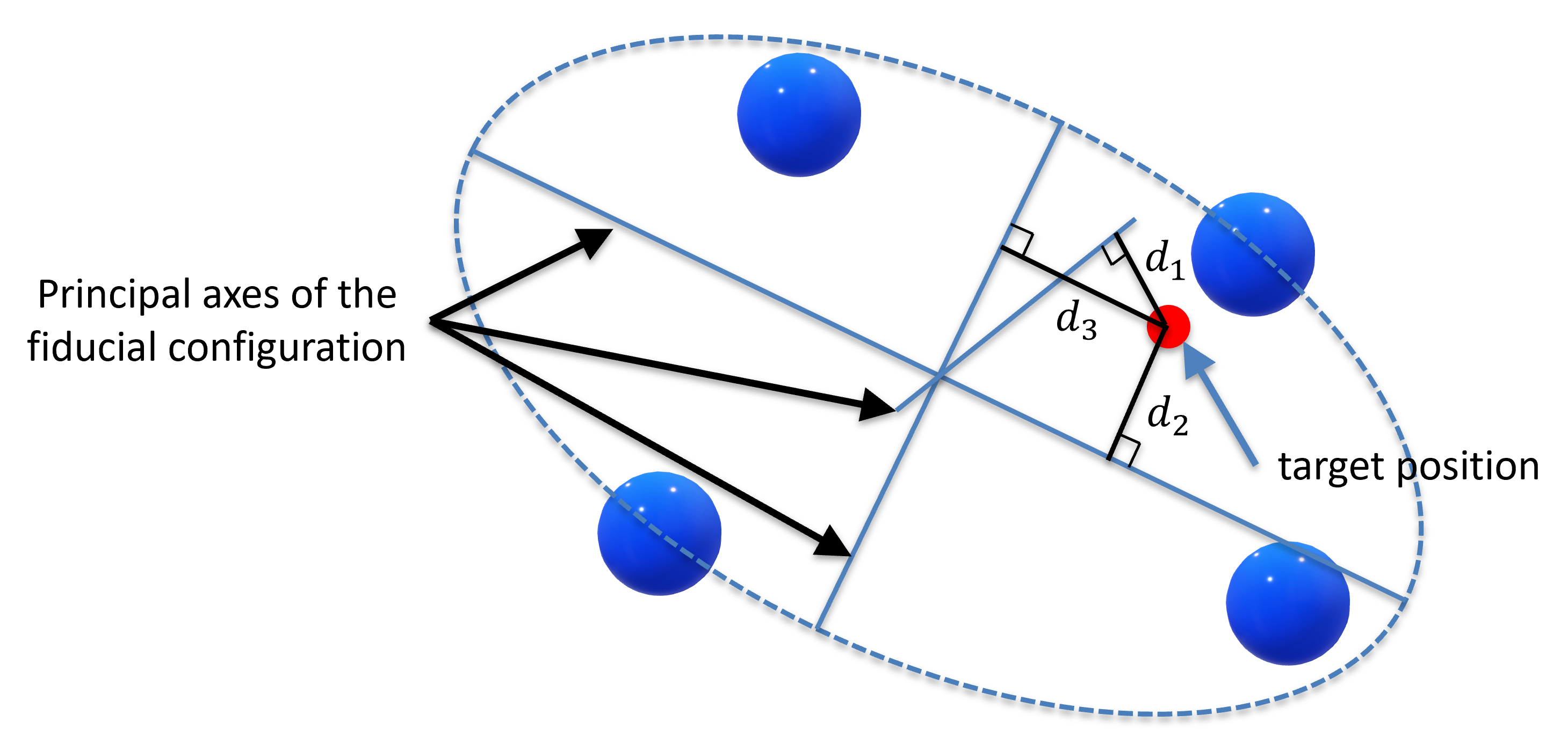
Figure 5:The spatial distribution of the registration fiducial, called the configuration, can be described by an ellipsoid enclosing them. In this regard, their principal axes can be determined using techniques such as the principal component analysis (PCA). For a given target, shown as a red sphere, denotes its distance from each of the 3 principal axes.
Therefore, to minimize the expected TRE, one may consider:
Increase the number of the registration fiducial points (i.e. increasing ),
Increase the spatial extent of the registration fiducial configuration, i.e. making them as large as possible to increase , and
Make the target point as close to the origin of the principal axes, i.e. decreasing .
Fitzpatrick et al. (1998) also demonstrated the relationship between the expected square FRE and the expected square FLE:
suggesting that the expected value of FRE, just like TRE, is proportional to FLE.
Bias in Fiducial Localization Error¶
While noise is random in nature, a bias in measurement is not.
Bias is a systematic tendency in which the methods used to gather data (measurement) and estimates a sample statistic present an inaccurate, skewed or distorted (biased) depiction of reality.
For example, suppose we employ an calibration stylus tip to localize salient anatomical features during the surgery. You may recall that the location of the stylus tip can be determined using pivot calibration: what if the location of the stylus tip was determined inaccurately?
If the location of the stylus tip was inaccurately calibration, it means that the digitized salient anatomical features will have an inherent bias: it is always too close or too far from the tracking sensor of the stylus!
If the bias is consistant, how would this influence the registration accuracy?
It will not!.
Target Registration Error and Fiducial Registration Error¶
Eqns.(5) and (6) showed that both TRE and FRE are proportional to FLE, does that mean that TRE and FRE are proportional to each other?
- Yaniv, Z. (2008). Rigid Registration. In T. M. Peters & K. Cleary (Eds.), Image-Guided Interventions: Technology and Applications (pp. 159–192). Springer US. 10.1007/978-0-387-73858-1_6
- Besl, P. J., & McKay, N. D. (1992). A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2), 239–256. 10.1109/34.121791
- Fitzpatrick, J. M. (2009). Fiducial registration error and target registration error are uncorrelated. In M. I. M. Miga & K. H. Wong (Eds.), Medical Imaging 2009: Visualization, Image-Guided Procedures, and Modeling (Vol. 7261, p. 726102). SPIE. 10.1117/12.813601
- Fitzpatrick, J. M., West, J. B., & Maurer, C. R. (1998). Predicting error in rigid-body point-based registration. IEEE Transactions on Medical Imaging, 17(5), 694–702. 10.1109/42.736021